Semantic Compressive Feedback Control for Nanorobotic Manipulations
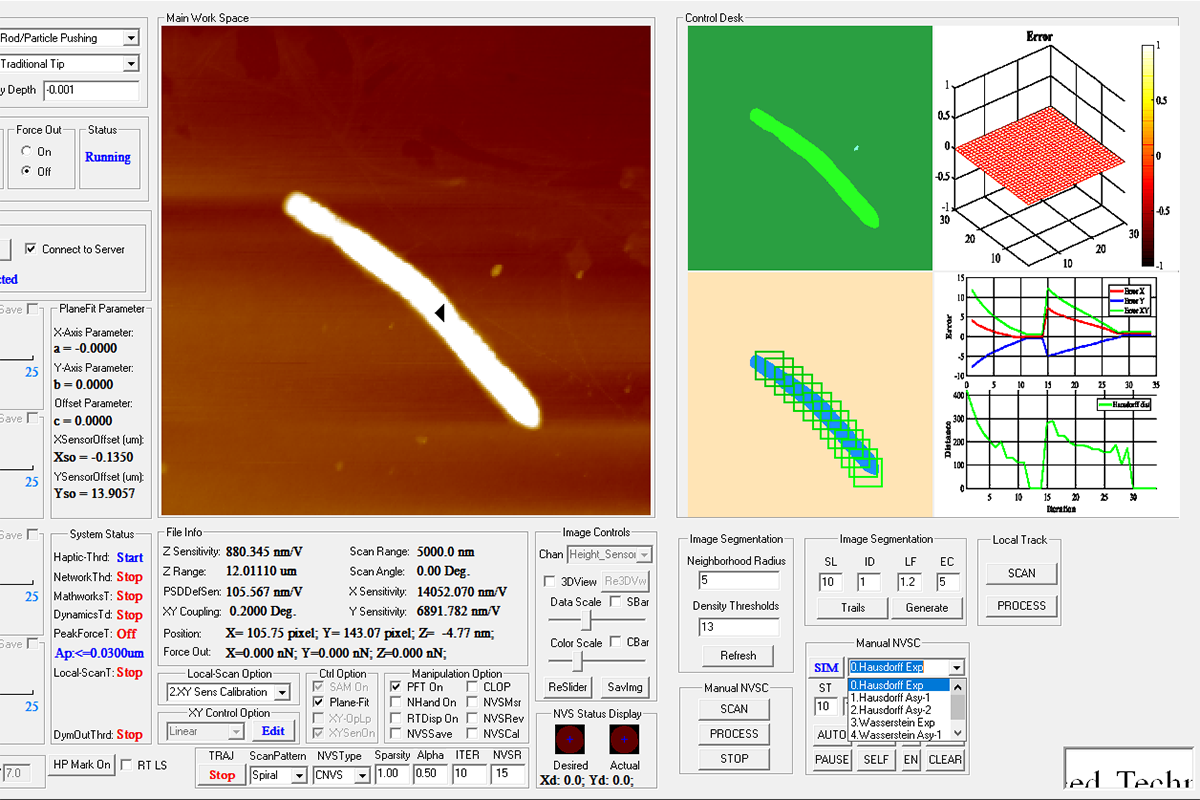
Conventional scanning probe microscopy (SPM) based nanomanipulations always have to face scanner accuracy problems such as hysteresis, nonlinearity, and thermal drift. Although some scanners consist of internal position sensors, the sensitivity is not high enough to monitor high-resolution nanomanipulations. Additionally, once the scan size decreases to a nanolevel such as less than 100 nm, the noise brought by sensors is large enough to affect the performance of the closed-loop motion control system. In order to solve the accuracy problem in nanomanipulation, we have proposed a non-vector space control strategy based on compressed feedback to improve the accuracy of SPM based nanomanipulations. In this approach, local images are used as both the reference input and feedback for a non-vector space closed-loop controller which considers the local image as a set. The controller is designed in non-vector space and it requires no prior information on features or landmarks which are widely used in traditional visual servoing.
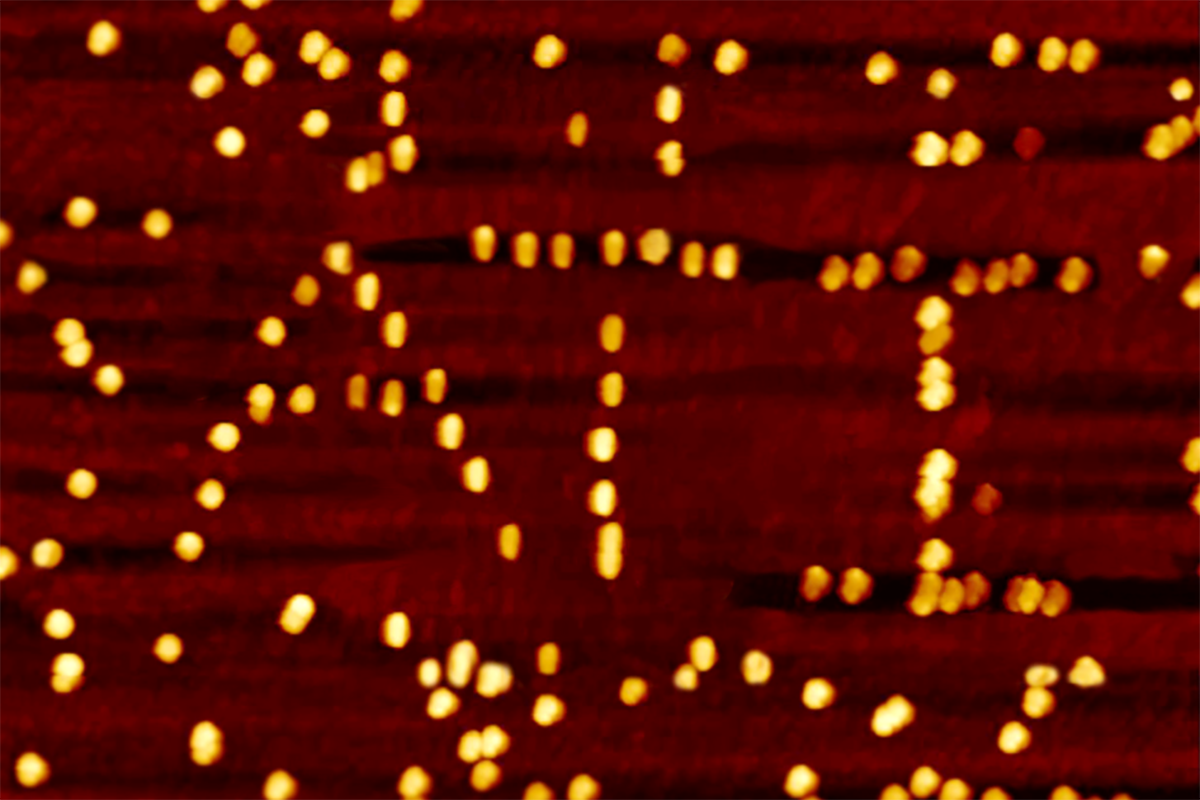
Meanwhile, in order to further improve control efficiency, we adopt compressed sensing technique which can approximately completely recover the local images based on the compressed matrix and partial sampled data. By using the compressed data to replace local images as the controller input, we have further improved the control speed. In order to illustrate the contributions and potential applications of this non-vector controller, we have conducted an application of carbon nanotube local electrical property characterization based on non-vector space motion control to clearly verify the concept. Compared with other research in local electrical property characterization, the non-vector space controller can ensure that the measurement accuracy (position error) is controlled within a few nanometers, which also ensures the reliability of measurement results. Additionally, this non-vector space control method can be implemented into any kind of SPM to realize a real-time control for nanomanipulation such as nanofabrication and nanoassembly.