Robotic Manipulations of Unstructured Objects
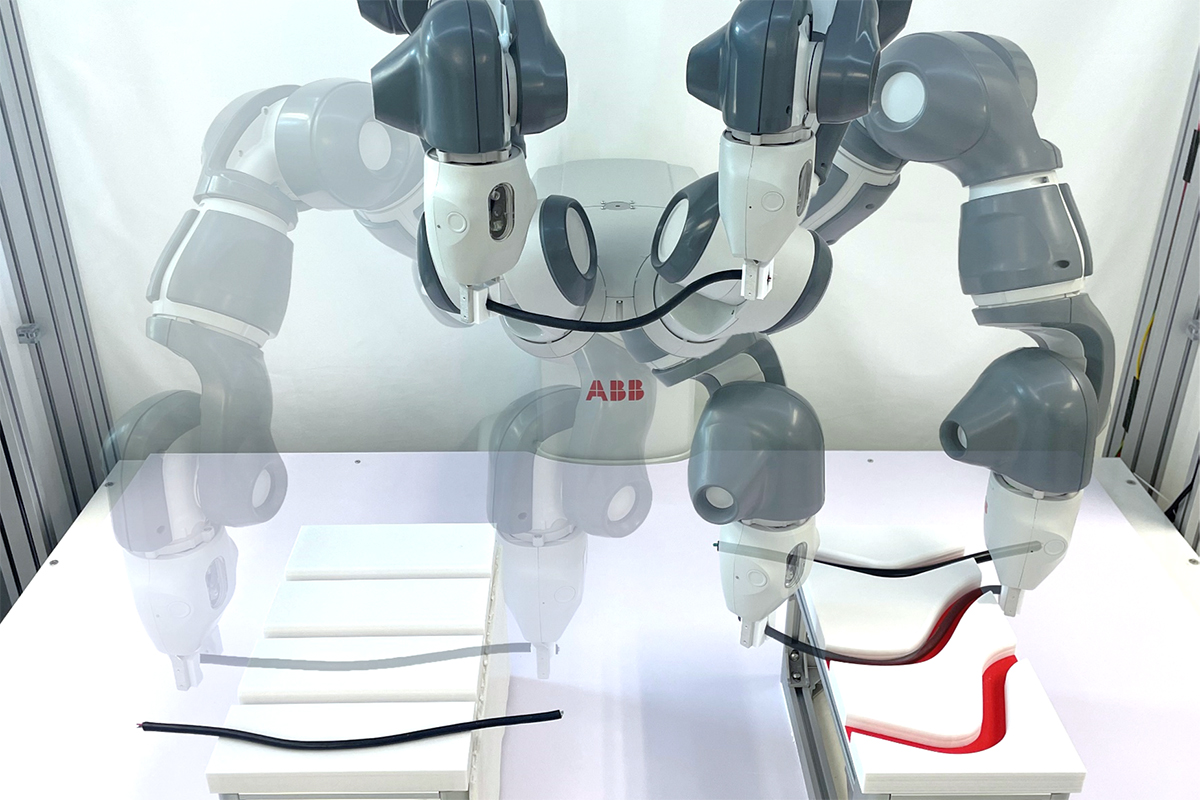
Cheaper, more capable, and more flexible technologies are accelerating the growth of fully automated production facilities. In recent years, because of the falling prices of robots, their new capabilities, and the ease of integration, an increasing number of various types of robots have taken on new roles in the automatic assembly of products in different manufacturing fields, including the 3C, the automobile industry, and even dangerous scenarios for humans. As is often the case when assembling a product, deformable electrical cables are involved and their shapes will be changed. Automatic cable assembly using robots is gaining more and more attention because of the dramatic increase in efficiency and stability that it can bring to manufacturing systems. To accomplish various cable shape-fitting tasks, the deformation characteristics of cables need to be understood. However, unlike rigid ones, the dynamics of deformable cables is highly non-linear, and their manipulation or control by robots is hard to achieve since they have no explicit visual features. To overcome the non-linearity problem of cable dynamics, we propose a learning-based method to model the impact of a robot action on the deformation of the cable. Based on this model, we apply a sampling-based optimization method to plan a sequence of robot actions to manipulate the cable from the initial shape into our desired one.